Stanford chemical engineer Zhenan Bao, PhD, has been working for decades to develop an electronic skin that can provide prosthetic or robotic hands with a sense of touch and human-like manual dexterity.
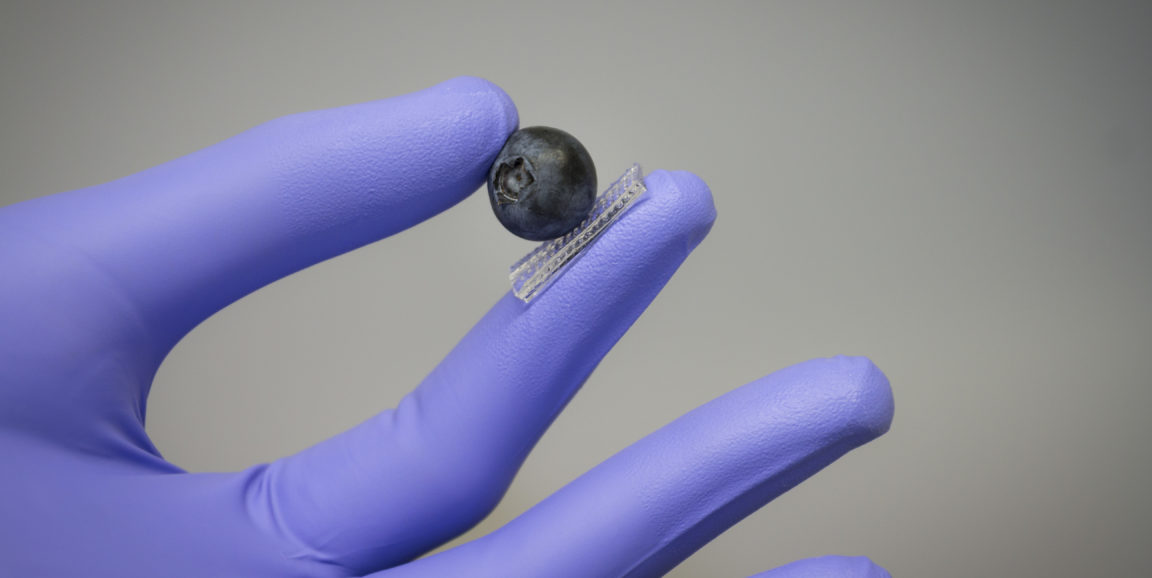
Her team’s latest achievement is a rubber glove with sensors attached to the fingertips. When the glove is placed on a robotic hand, the hand is able to delicately hold a blueberry between its fingertips. As the video shows, it can also gently move a ping-pong ball in and out of holes without crushing it.
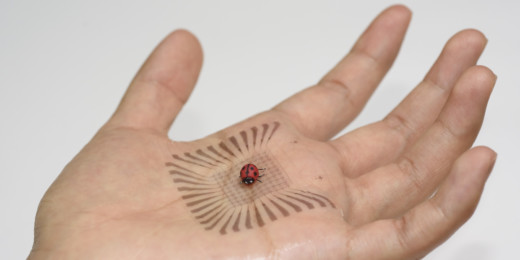
The sensors in the glove’s fingertips mimic the biological sensors in our skin, simultaneously measuring the intensity and direction of pressure when touched. Each sensor is composed of three flexible layers that work together, as described in a recent paper published in Science Robotics.
The sensor’s two outer layers have rows of electrical components that are aligned perpendicular to each other. Together, they make up a dense array of small electrical sensing pixels. In between these layers is an insulating rubber spacer.
The electrically-active outer layers also have a bumpy bottom that acts like spinosum — a spiny sublayer in human skin with peaks and valleys. This microscopic terrain is used to measure the pressure intensity. When a robotic finger lightly touches an object, it is felt by sensing pixels on the peaks. When touching something more firmly, pixels in the valleys are also activated.
Similarly, the researchers use this terrain to detect the direction of the touch. For instance, when the pressure comes from the left, then it's felt by pixels on the left side of the peaks more than the right side.
Once more sensors are added, such electronic gloves could be used for a wide range of applications. As a recent Stanford Engineering news release explains, “With proper programming a robotic hand wearing the current touch-sensing glove could perform a repetitive task such as lifting eggs off a conveyor belt and placing them into cartons. The technology could also have applications in robot-assisted surgery, where precise touch control is essential.”
However, Bao hopes in the future to develop a glove that can gently handle objects automatically without prior programming. She said in the release:
We can program a robotic hand to touch a raspberry without crushing it, but we’re a long way from being able to touch and detect that it is a raspberry and enable the robot to pick it up.
Image and video courtesy of the Bao Lab